PP11D-36
PP11D-36
PP11D-36
COSTR. proServo Joint
COSTR. ProServo Joint
Micro flexible servo robot joint with Planetary Reducer.
Micro flexible servo robot joint with Planetary Reducer.

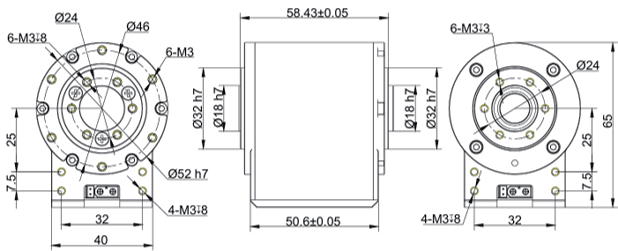
PP11D-36 Introduction [Unit: mm]
Diameter:
Φ52 mm
Length:
61 mm
Weight:
436g
PP11D-36 Introduction [Unit: mm]
Diameter:
Φ52 mm
Length:
61 mm
Weight:
436g
Voltage and Current Parameters
Rated Voltage:
24 V
Rated Power:
60 W
Rated Speed:
50 rpm
No-load Speed:
80 rpm
Rated Torque:
6.6 N·m
Peak Torque:
14 N·m
Phase Current Full Scale:
12.0 A
Max Bus Current:
2.0 A
Static Bus Current:
0.04 A
Basic Parameters
Motor Type:
Brushless Servo Motor
Reducer type:
Planetary Reducer
Torsional Coefficient:
2.2 Nm/a
Axial Bearing Capacity:
1605 N
Radial Bearing Capacity:
3150 N
Temperature Range:
-20°C to +80°C
Typical Noise Level:
<= 70 dB (A)
Resolution:
-
Reduction Ratio:
36:1
Reverse Backlash:
12 Arcmin
Micro Servo Joint System Overview
SDK Support
We provide application programming interfaces and log tools in different languages. If system developers want to control servo joints, they can work in the language environment commonly used by users or suitable for the project.

Supported Language:

MATLAB

Python

C++

ROS
Bus Adapter Board
The integrated servo joint adopts CAN2.0A for communication, and converts it into Ethernet bus through EC-CO to communicate with PC.
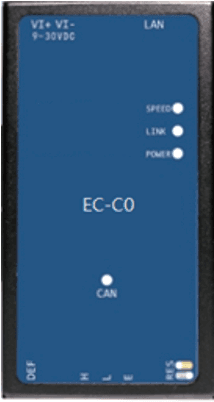
CAN
Two CAN2.0A maximum speed 1Mbps
10M/100M adaptive support TCP/UDP
Support secondary development firmware online upgrade
Power isolation isolation voltage 1000V
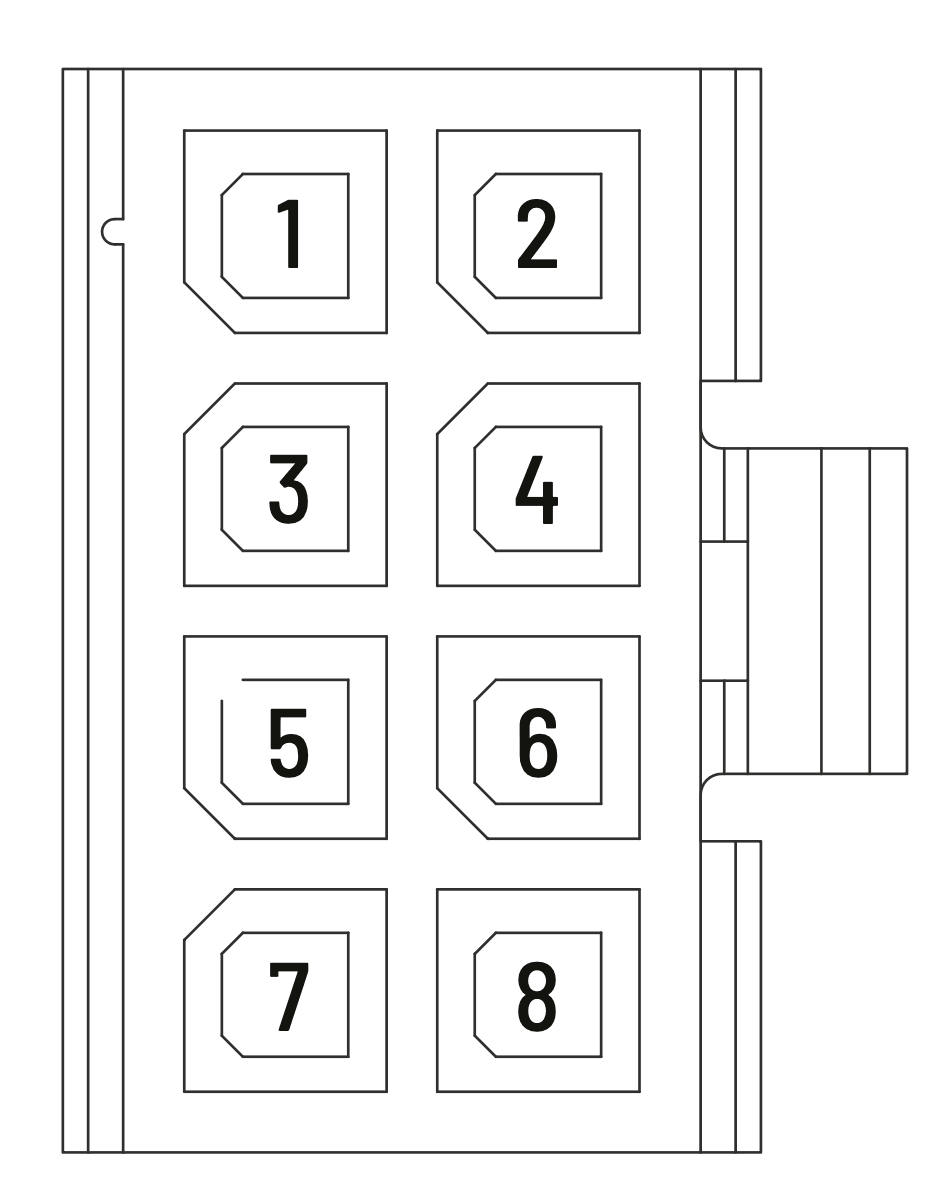
CAN Hardware Connection
Pin No.
Defined
Describe
1
PVDD
Power supply
2
GND
Power ground
3
PVDD
Power supply
4
GND
Power ground
5
5V
Standby power
6
CGND
CAN communication ground
7
CANL
CAN differential signal
8
CANH
CAN differential signal
Micro Servo Joint System Overview
SDK Support
We provide application programming interfaces and log tools in different languages. If system developers want to control servo joints, they can work in the language environment commonly used by users or suitable for the project.
Supported Language:
MATLAB
Python
C++
ROS
Bus Adapter Board
The integrated servo joint adopts CAN2.0A for communication, and converts it into Ethernet bus through EC-CO to communicate with PC.
CAN
Two CAN2.0A maximum speed 1Mbps
10M/100M adaptive support TCP/UDP
Support secondary development firmware online upgrade
Power isolation isolation voltage 1000V
CAN Hardware Connection
Pin No.
Defined
Describe
1
PVDD
Power supply
2
GND
Power ground
3
PVDD
Power supply
4
GND
Power ground
5
5V
Standby power
6
CGND
CAN communication ground
7
CANL
CAN differential signal
8
CANH
CAN differential signal
Micro Servo Joint System Overview
SDK Support
We provide application programming interfaces and log tools in different languages. If system developers want to control servo joints, they can work in the language environment commonly used by users or suitable for the project.
Supported Language:
MATLAB
Python
C++
ROS
Bus Adapter Board
The integrated servo joint adopts CAN2.0A for communication, and converts it into Ethernet bus through EC-CO to communicate with PC.
CAN
Two CAN2.0A maximum speed 1Mbps
10M/100M adaptive support TCP/UDP
Support secondary development firmware online upgrade
Power isolation isolation voltage 1000V
CAN Hardware Connection
Pin No.
Defined
Describe
1
PVDD
Power supply
2
GND
Power ground
3
PVDD
Power supply
4
GND
Power ground
5
5V
Standby power
6
CGND
CAN communication ground
7
CANL
CAN differential signal
8
CANH
CAN differential signal
Empowering Smart, Practical Automation.
COSMOTR GLOBAL TECHNOLOGY SOLUTIONS PTY LTD
Email: info@cosmotrglobal.com
Level 16, 175 Pitt Street Sydney, NSW 2000 Australia
© 2025 Cosmotr Global Technolog Solutions Pty Ltd | ACN 685 456 982 | All rights reserved.
Empowering Smart, Practical Automation.
COSMOTR GLOBAL TECHNOLOGY SOLUTIONS PTY LTD
Email: info@cosmotrglobal.com
Level 16, 175 Pitt Street Sydney, NSW 2000 Australia
© 2025 Cosmotr Global Technolog Solutions Pty Ltd | ACN 685 456 982 | All rights reserved.
Empowering Smart, Practical Automation.
COSMOTR GLOBAL TECHNOLOGY SOLUTIONS PTY LTD
Email: info@cosmotrglobal.com
Level 16, 175 Pitt Street Sydney, NSW 2000 Australia
© 2025 Cosmotr Global Technolog Solutions Pty Ltd | ACN 685 456 982 | All rights reserved.